|
We are working on refactoring the Donkey code to support a more modular architecture so that people can contribute code rather than rewriting the library. All the hardware of the Donkey2 standard build will remain the same but it will be easier to add sensors(lidar, odometry, ... ) or change controllers (bluetooth, webserver, adhoc wifi, ...). 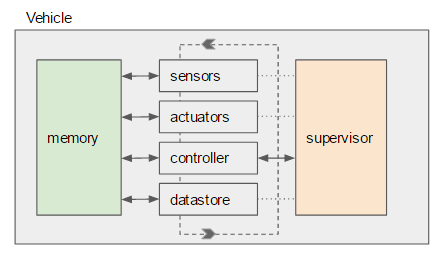 It borrows concepts from Keras and ROS to make creating and experimenting with your car easy. Everything is still all python. You can see the concept in action in this Jupyter notebook and can join the discussion in the #donkey_core slack channel. We'll post update instructions to the #general slack channel when it's ready to drive.
2 Comments
carfans
1/25/2018 08:11:57 am
why not adopt ROS directly? looks like it's reinvent the wheel. Leave a Reply. |
|
|
Donkey is an open source project powered by volunteers with a shared interest to build their own self driving cars. |